|
Valor 6800 1.0
|
|
Valor 6800 1.0
|
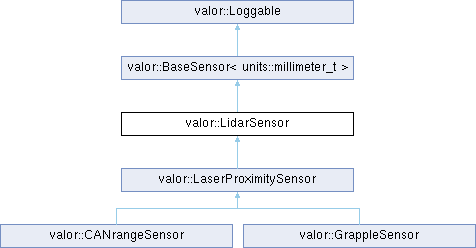
Specific implementation of the Lidar Sensor for Grapple Robotics LidarCAN device. More...
#include <LidarSensor.h>
Classes | |
| struct | SimState |
Public Member Functions | |
| LidarSensor (frc::TimedRobot &robot) | |
| Construct a new LidarSensor object. | |
| units::millimeter_t | getMaxDistance () |
| Get the maximum distance threshold for the Lidar sensor. | |
| void | setMaxDistance (units::millimeter_t maxDistance) |
| Set the maximum distance threshold for the Lidar sensor. | |
| void | setupSim (std::function< frc::Pose2d()> robotPoseGetter, frc::Transform2d sensorPosition, std::vector< sim::FieldFeature > features) |
| void | setGetter (std::function< units::millimeter_t()> getter) |
 Public Member Functions inherited from valor::BaseSensor< units::millimeter_t > Public Member Functions inherited from valor::BaseSensor< units::millimeter_t > | |
| virtual void | reset () |
| Reset the sensor state. | |
| void | setGetter (std::function< units::millimeter_t()> _lambda) |
| Set the lambda function to fetch sensor data. | |
| void | applyPostProcessing (std::function< units::millimeter_t(units::millimeter_t)> func) |
| Set a post-processing function for sensor data. | |
| units::millimeter_t | get () |
| Get the current sensor state. | |
| Public Member Functions inherited from valor::Loggable | |
| void | LogChild (std::string_view name, Loggable *child) |
| Register a child Loggable under a named subtree. | |
| void | LogChild (std::string_view name, wpi::Sendable *child) |
| Register a child Sendable under a named subtree. | |
| void | setLoggingPeriod (units::millisecond_t period) |
| Set the minimum period between LoggablePeriodic() invocations. | |
| template<> | |
| decltype(Loggable::subscribers) ::iterator | addSubscriber (std::string_view field, const std::vector< bool > &defaultValue) |
| template<> | |
| void | WriteLogImpl (nt::Publisher *pub, const std::vector< bool > &data) |
| template<> | |
| std::vector< bool > | ReadLogImpl (nt::Subscriber *sub) |
Protected Member Functions | |
| void | calculate () override |
| Perform Lidar-specific calculations. | |
| Protected Member Functions inherited from valor::BaseSensor< units::millimeter_t > | |
| BaseSensor (frc::TimedRobot &robot) | |
| Construct a new BaseSensor object. | |
| virtual void | refresh () |
| Refresh the sensor state. | |
| Protected Member Functions inherited from valor::Loggable | |
| Loggable (std::string_view name) | |
| Construct a Loggable that registers a top-level table name. | |
| Loggable () | |
| Default construct an uninitialized Loggable. | |
| virtual | ~Loggable ()=default |
| Virtual destructor. | |
| virtual void | OnLoggingStart () |
| Hook invoked when logging is started for this object. | |
| virtual void | LoggablePeriodic () |
| Periodic callback for logging updates. | |
| template<typename T > | |
| T | WriteLog (std::string_view field, const T &data) |
| Publish a value to NetworkTables under the given field. | |
| template<typename T > | |
| T | ReadLog (std::string_view field, const T &defaultValue={}) |
| Read a value from NetworkTables for the given field. | |
Protected Attributes | |
| std::unique_ptr< SimState > | simState |
| Protected Attributes inherited from valor::BaseSensor< units::millimeter_t > | |
| std::function< units::millimeter_t()> | sensorLambda |
| Lambda function to fetch sensor data. | |
| std::function< units::millimeter_t(units::millimeter_t)> | postProcessor |
| Lambda function to post-process sensor data. | |
| units::millimeter_t | prevState |
| Previous and current sensor states. | |
| units::millimeter_t | currState |
| frc::Timer | profiler |
Additional Inherited Members | |
| Static Public Member Functions inherited from valor::Loggable | |
| static units::millisecond_t | GetLoggingTime () |
Specific implementation of the Lidar Sensor for Grapple Robotics LidarCAN device.
This class extends the BaseSensor class and provides functionality specific to the Lidar sensor. It allows for fetching distance measurements and setting a maximum distance threshold.
|
explicit |
Construct a new LidarSensor object.
| robot | Reference to the robot, used to schedule the calculate method. |
|
overrideprotectedvirtual |
Perform Lidar-specific calculations.
This method is called every 10ms and processes the sensor data fetched by the lambda function.
Implements valor::BaseSensor< units::millimeter_t >.
| units::millimeter_t valor::LidarSensor::getMaxDistance | ( | ) |
Get the maximum distance threshold for the Lidar sensor.
| void valor::LidarSensor::setMaxDistance | ( | units::millimeter_t | maxDistance | ) |
Set the maximum distance threshold for the Lidar sensor.
| maxDistance | Maximum distance threshold in millimeters. |