|
Valor 6800 1.0
|
|
Valor 6800 1.0
|
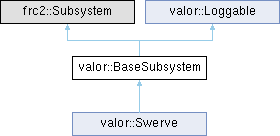
Abstract class that all Valor subsystem's should implement. More...
#include <BaseSubsystem.h>
Public Member Functions | |
| BaseSubsystem (std::string name) | |
| Construct a new Valor Subsystem object. | |
| virtual void | analyzeDashboard () |
| Synchronize dashboard data (both read and write) | |
| virtual void | assessInputs () |
| Read controller logic and set subsystem state. | |
| virtual void | assignOutputs () |
| Read subsystem state and send motor commands. | |
| virtual void | reset () |
| Reset all subsystem state. | |
| void | setGamepads (valor::Gamepad *_operatorGamepad, valor::Gamepad *_driverGamepad) |
 Public Member Functions inherited from valor::Loggable Public Member Functions inherited from valor::Loggable | |
| void | LogChild (std::string_view name, Loggable *child) |
| Register a child Loggable under a named subtree. | |
| void | LogChild (std::string_view name, wpi::Sendable *child) |
| Register a child Sendable under a named subtree. | |
| void | setLoggingPeriod (units::millisecond_t period) |
| Set the minimum period between LoggablePeriodic() invocations. | |
| template<> | |
| decltype(Loggable::subscribers) ::iterator | addSubscriber (std::string_view field, const std::vector< bool > &defaultValue) |
| template<> | |
| void | WriteLogImpl (nt::Publisher *pub, const std::vector< bool > &data) |
| template<> | |
| std::vector< bool > | ReadLogImpl (nt::Subscriber *sub) |
Protected Attributes | |
| valor::Gamepad * | operatorGamepad |
| valor::Gamepad * | driverGamepad |
Additional Inherited Members | |
| Static Public Member Functions inherited from valor::Loggable | |
| static units::millisecond_t | GetLoggingTime () |
| Protected Member Functions inherited from valor::Loggable | |
| Loggable (std::string_view name) | |
| Construct a Loggable that registers a top-level table name. | |
| Loggable () | |
| Default construct an uninitialized Loggable. | |
| virtual | ~Loggable ()=default |
| Virtual destructor. | |
| virtual void | OnLoggingStart () |
| Hook invoked when logging is started for this object. | |
| virtual void | LoggablePeriodic () |
| Periodic callback for logging updates. | |
| template<typename T > | |
| T | WriteLog (std::string_view field, const T &data) |
| Publish a value to NetworkTables under the given field. | |
| template<typename T > | |
| T | ReadLog (std::string_view field, const T &defaultValue={}) |
| Read a value from NetworkTables for the given field. | |
Abstract class that all Valor subsystem's should implement.
To make developer's lives easier and to prevent any mistakes in a quick build season, BaseSubsystem is used to organize code and abstract a lot of the base code that is often repetitive in all subsystems.
Valor Subsystem implements the FRC WPILib Subsystem class and therefore has all baked in features from WPILib.
The idea is that subsystems on the robot implement BaseSubsystem and logic for that subsystem is broken out into 3 different functions:
Every 20 milliseconds when the robot is on, the functions will run in order if the robot state matches what is in the table below: Robot State | assessInputs | analyzeDashboards | assignOutputs ---------—|-----------—|----------------—|-----------— Disabled |
✖
|
✔
|
✖
Auto |
✖
|
✔
|
✔
Teleop |
✔
|
✔
|
✔
Descriptions for each function and their intent is listed in the function description
|
inlineexplicit |
Construct a new Valor Subsystem object.
Sets up the infrastructure so that the various robot modes will automatically call the proper function. This NEEDS to be called from the constructor of every subsystem.
| name | A human readable name of the subsystem |
Synchronize dashboard data (both read and write)
The analyzeDashboard function runs at all times (disabled, auto, and teleop). The intent of the function is to send sensor and state information from the robot to the Driver Station for debugging. Additionally, driver commands and data can be sent from the Driver Station to the robot and collected in this function.
ALL network table and sensor logic should be in this function as both network table and sensor information should be read at all times, not just during teleop since auto will never get that information.
This function is a virtual function and should be implemented by the subsystem.
Reimplemented in valor::Swerve.
Read controller logic and set subsystem state.
assessInputs only runs during teleop and should be used to convert driver/operator inputs into subsystem state. Since this function only runs during teleop, driver/operator inputs in auto are ignored which is completely okay. Instead, our auto commands will mimic driver input and set the states.
Note that state should not be READ in this function, and instead should only be WRITEs. This is because using previous state will occur in assignOutputs when determining what values to send to motors.
Suggested flow:
This function is a virtual function and should be implemented by the subsystem.
Read subsystem state and send motor commands.
This function runs during teleop and auto, but not disabled. This is because the function is intended to control motors and should not send motor outputs when the robot is disabled. assignOutputs should read the subsystem state set in assessInputs and analyzeDashboard and create motor commands.
Note that state should be READ and not be written to (the opposite of assessInputs). The big rule to obey with this function is that other subsystem's state should never be written to. For example, if sensors in subsystem A determine outputs for subsystem A AND subsystem B, then the sensor should live in both subsystems instead of subsystem A trying to write results in subsystem B. This will make logic easier to understand for all developers.
Suggested flow:
This function is a virtual function and should be implemented by the subsystem.
Reimplemented in valor::Swerve.
Reset all subsystem state.
Use this function to set the subsystem state to default values, as well as set the motor outputs to 0 so the robot doesn't "lurch" when booting up due to phantom state (aka. state that was previously set but hasn't been reset yet).
This function is a virtual function and should be implemented by the subsystem.
Reimplemented in valor::Swerve.